随着人工智能技术的飞速发展,人形机器人已成为当今智能科技领域的热门话题和市场焦点。这些机器人不仅在制造业的自动化领域得到广泛应用,还逐渐渗透到了日常生活、医疗护理、娱乐等各个领域。

在人形机器人的制造和应用过程中,关节驱动技术是至关重要的一环。关节驱动技术直接影响着机器人的运动灵活性、精准度和安全性,因此对于人形机器人的设计和制造来说,选择合适的关节驱动技术至关重要。

英飞凌(Infineon)作为全球领先的半导体解决方案提供商,其产品在人形机器人关节驱动领域具有独特的优势和广泛的应用前景。作为英飞凌的合作伙伴和代理商,贝能深知英飞凌产品在人形机器人关节驱动领域的优势和应用前景,特此向您介绍英飞凌产品在该领域的应用。
人形机器人的动力由其身体上的旋转关节以及直线关节的电机来驱动,作为机器人的动力来源,电机驱动部分是机器人的基石。
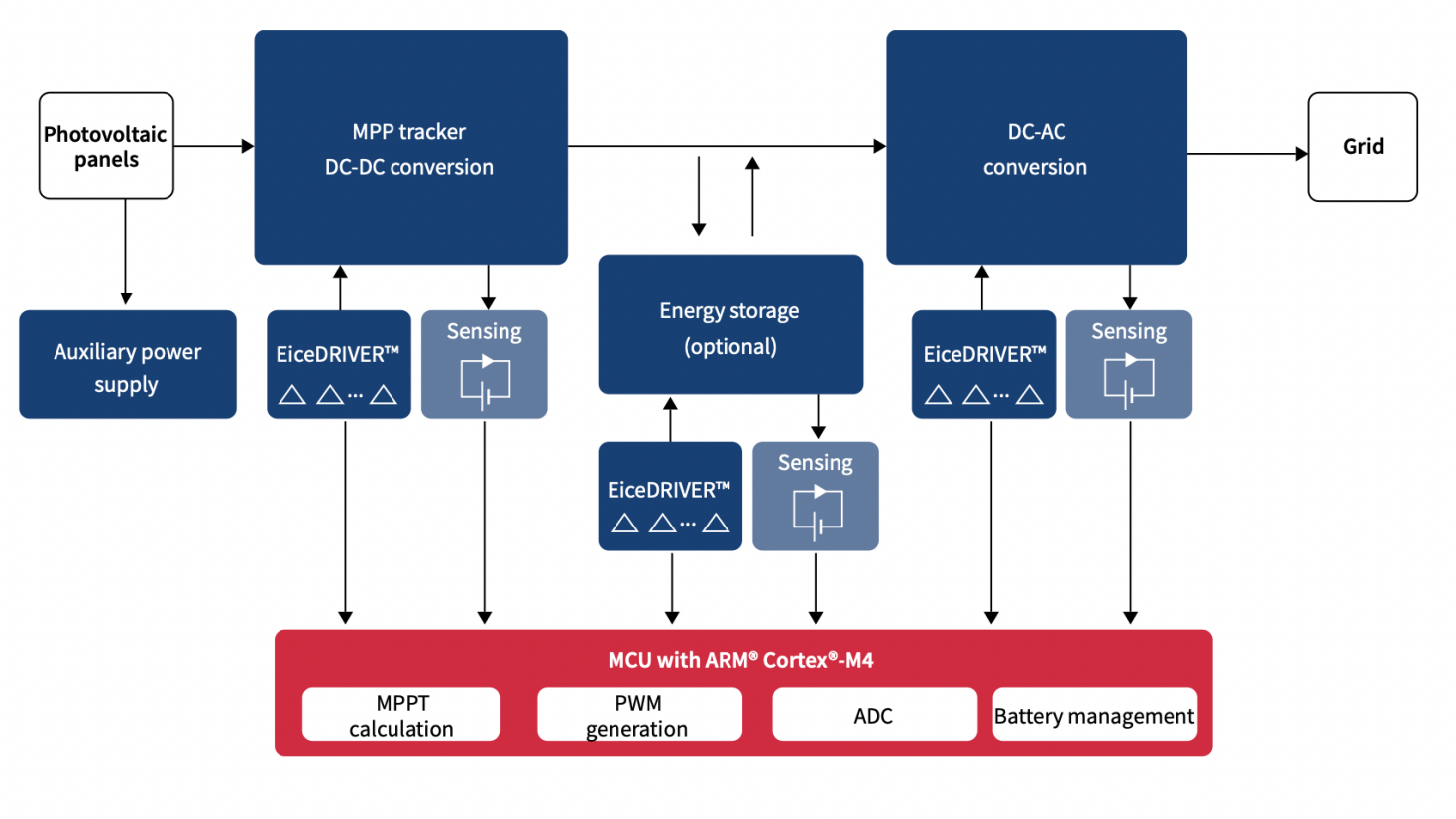
英飞凌 PSoC系列
提供一拖二驱动双电机FOC的参考设计
一般由于人形机器人关节驱动对于其PCBA体积敏感,所以所采用芯片为较小封装,且电机驱动通常设计为一板拖多电机的形式,这对于MCU的处理能力会有较大的要求,一般要求其具有Arm-Cortex M4核,主频150MHZ以上的算力。
英飞凌PSoC系列MCU CY8C6244LQI-S4D92 ,带有Cortex M4 主频150MHz与Cortex M0 100MHz双核,并具有2个12bit 1Mbps ADC,非常适合一拖二场景下的电机应用,英飞凌提供一拖二驱动双电机FOC的参考设计,助力客户快速开发新项目。
.jpg")
英飞凌新一代Optimos 6
有效减少并联,提高系统效率
因为人形机器人整体体积较大,所以关节电驱整体功率较大,驱动电流整体较高,对于功率芯片本身的性能以及散热处理都有很高的要求,高性能的功率器件对于人形机器人电驱非常必要。
在功率器件选型方面,英飞凌新一代Optimos 6 针对散热、开关和通态损耗、功率密度进行了优化,并且拥有针对机器人市场的DFN5×6和DFN3*3的小封装。可有效减少并联以及提高系统效率,非常适合人形机器人应用,主要型号有ISC022N10NM6、ISC027N10NM6、ISC030N10NM6。

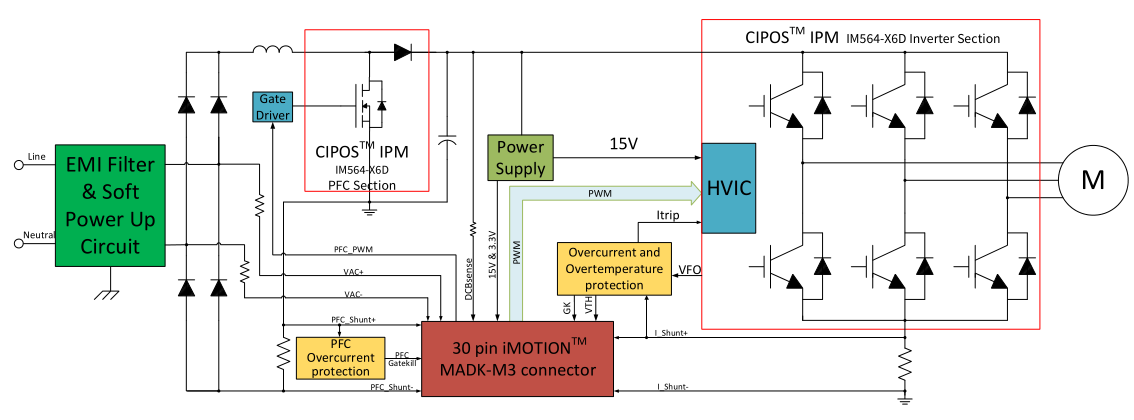
Gate Driver
英飞凌提供小封装且集成多种功能的智能驱动
Gate Driver 方面,小封装且集成多种功能的智能驱动更加符合应用需求。英飞凌6EDL7141、门级驱动集成DCDC、LDO与电流检测运放,最高支持电压60V,针对电池供电进行了专门的功耗优化,非常适合小电压平台的电机驱动。英飞凌6ED2742S01Q具有160V耐压、集成电荷泵以及电流检测运放、5*5小封装等优势,非常适合电压平台较高的人形机器人应用。

英飞凌 XMC4800/XMC4300
单芯片集成EtherCAT助力人形机器人通信
人形机器人需要对于电机驱动的位置精度要求较高,一般采用EtherCAT来进行多轴协同通信的命令同步。
(1).jpg")
英飞凌XMC4800和XMC4300是业界首次在ARM® Cortex®-M处理器上集成EtherCAT®节点的微控制器。实现最紧凑的设计,帮助设计人员节省PCB空间。XMC4800外设资源丰富,支持EtherCAT通信的同时控制双电机。XMC4300针对EtherCAT通信专门设计,支持OSPI通信,比竞品从栈芯片通信速率显著提升。
(2).jpg")
英飞凌磁角度传感器
15bit分辨率 1°误差提供高可靠角度反馈
人形机器人电机驱动对于位置控制要求较高,其采用的控制方式多为有感FOC控制,需要编码器对位置进行精准的反馈。英飞凌TLI5012B 1000磁性角度传感器,分辨率达15bit绝对角度,误差控制在1°,为客户提供高可靠的位置传感方案,高效助力客户电机驱动位置反馈设计。

人形机器人市场前景广阔,随着人工智能、机器人技术的不断进步和成本的逐渐降低,人形机器人的应用范围和市场规模将进一步扩大。人形机器人除了关机驱动还有灵巧手、充电管理以及域控方面的组成部分,后续为大家介绍更多方面的相关整体方案的推荐。